The origins of tensegrity systems are linked to Kenneth D. Snelson, Richard Buckminster Fuller and David Georges Emmerich. Although, as Emmerich (1988) referred, the first proto-tensegrity system was called "Gleichgewichtkonstruktion" and was conceived by Karl Ioganson in 1920 (Fig_07). It was a structure that had most of the basic properties of tensegrity systems such as the connectivity between struts and cables and the equilibrium condition, but the absence of pre-stress cannot allow this structure to be characterized as the first original tensegrity system.
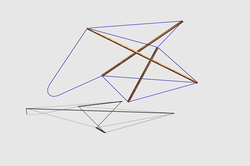
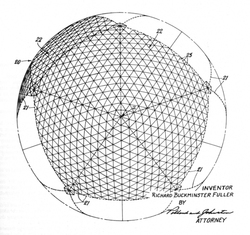
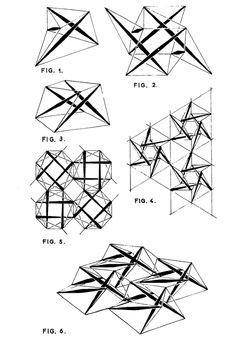
Kenneth D. Snelson, that was Richard Buckminster Fuller’s student, dealt with the artistic approach of tensegrity systems as sculptures in space giving him the possibility to explore different, non-symmetrical shapes far away from any classical configuration (Fig_08). In contrast with Snelson, Fuller and Emmerich were focusing more in the physical and mathematical aspect of these systems and were trying to find the actual application in architecture and engineering. They dealt with the development of spherical and one-dimensional tensegrity systems, giving the trigger to other scientists to investigate more the structural approach of them. (Fig_09, Fig_10)
Also, Fuller and other scientists through the deep exploration of tensegrity systems, started to conceive them as the basic principle of the Universe. “All structures, properly understood, from the solar system to the atom, are tensegrity structures. Universe is Omni tensional integrity” (Fuller, 1975, 700.04) Also, as Burrows mentioned some scientists started to conceive tensegrity as an answer to a general question about the nature of structure, or even more, about the structure of nature. (Burrows, 1989) So, the term tensegrity system started to be extended in other fields Biology, Inorganic Chemistry, Anatomy, Robotics and Astronautics.
The reasons that the investigation of tensegrity systems as structural components was not thoroughly explored, was the lack of technology and powerful tools to implement an actual design approach where all the calculations will be accurate. The geometrical complexity of these systems presupposed the existence of the appropriate tools that would ensure the constructability. As the computation was gradually embedded in the architectural and engineering design the accuracy was feasible and the combination with algorithmic logic aided the designers to achieve complexity faster and bringing automation into play.
It is clearly expressed in current available literature that the three main different research directions on tensegrity systems study are the dynamic behavior, the active control and the form-finding. Out of them only the latter has been well-explored and this has been through limited configurations and very little work have gone in the rest ones. In terms of form - finding that is the subject of this dissertation, there are quite enough methods that were implemented such as dynamic relaxation but most of them investigate regular topologies where the initial topology of connections is taken for granted (Connely and Black, 1998). An interesting approach for form - finding of irregular tensegrity systems using Dynamic Relaxation and Genetic Algorithms applied by Chandana Paul et al. (2005) Some of the most interesting projects about these three research directions of tensegrity systems are available for search in bibliography references.
Kenneth D. Snelson, that was Richard Buckminster Fuller’s student, dealt with the artistic approach of tensegrity systems as sculptures in space giving him the possibility to explore different, non-symmetrical shapes far away from any classical configuration (Fig_08). In contrast with Snelson, Fuller and Emmerich were focusing more in the physical and mathematical aspect of these systems and were trying to find the actual application in architecture and engineering. They dealt with the development of spherical and one-dimensional tensegrity systems, giving the trigger to other scientists to investigate more the structural approach of them. (Fig_09, Fig_10)
Also, Fuller and other scientists through the deep exploration of tensegrity systems, started to conceive them as the basic principle of the Universe. “All structures, properly understood, from the solar system to the atom, are tensegrity structures. Universe is Omni tensional integrity” (Fuller, 1975, 700.04) Also, as Burrows mentioned some scientists started to conceive tensegrity as an answer to a general question about the nature of structure, or even more, about the structure of nature. (Burrows, 1989) So, the term tensegrity system started to be extended in other fields Biology, Inorganic Chemistry, Anatomy, Robotics and Astronautics.
The reasons that the investigation of tensegrity systems as structural components was not thoroughly explored, was the lack of technology and powerful tools to implement an actual design approach where all the calculations will be accurate. The geometrical complexity of these systems presupposed the existence of the appropriate tools that would ensure the constructability. As the computation was gradually embedded in the architectural and engineering design the accuracy was feasible and the combination with algorithmic logic aided the designers to achieve complexity faster and bringing automation into play.
It is clearly expressed in current available literature that the three main different research directions on tensegrity systems study are the dynamic behavior, the active control and the form-finding. Out of them only the latter has been well-explored and this has been through limited configurations and very little work have gone in the rest ones. In terms of form - finding that is the subject of this dissertation, there are quite enough methods that were implemented such as dynamic relaxation but most of them investigate regular topologies where the initial topology of connections is taken for granted (Connely and Black, 1998). An interesting approach for form - finding of irregular tensegrity systems using Dynamic Relaxation and Genetic Algorithms applied by Chandana Paul et al. (2005) Some of the most interesting projects about these three research directions of tensegrity systems are available for search in bibliography references.
Fig_07
Gleichgewichtkonstruktion by Karl Longason
Gleichgewichtkonstruktion by Karl Longason

Fig_08
Forest Devil by Snelson
Forest Devil by Snelson
Fig_09
Tensegrity patent by Richard Buckminster Fuller
Tensegrity patent by Richard Buckminster Fuller
Fig_10
Tensegrity patent by Emmerich
Tensegrity patent by Emmerich
